1) Fenómeno físico → 9) Control / monitoreo (desde la fórmula)
En el eje del anillo (radio \(a\)) a una distancia \(b\), la fuerza sobre una carga equivalente \(q\) es: \[ F(b)=\frac{2\pi k\,\lambda\,a\,b\,q}{(a^2+b^2)^{3/2}} \] donde \(k\) es la constante de Coulomb y \(\lambda\) la densidad lineal de carga.
1) Fenómeno físico
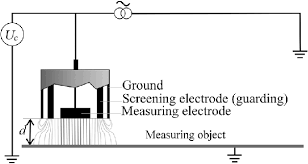
Existe una interacción electrostática controlada por la geometría (radio \(a\)) y la separación (posición \(b\)). En un sensor real, la “carga puntual” se reemplaza por un electrodo móvil (placa/disco) y un electrodo fijo (anillo/placa).
2) Campo / Fuerza
El campo eléctrico en el eje se obtiene dividiendo la fuerza entre la carga: \[ E(b)=\frac{F(b)}{q}=\frac{2\pi k\,\lambda\,a\,b}{(a^2+b^2)^{3/2}} \] Si cambia \(b\), cambia \(E(b)\). Esa dependencia es la “huella” del sensor.
3) Desplazamiento
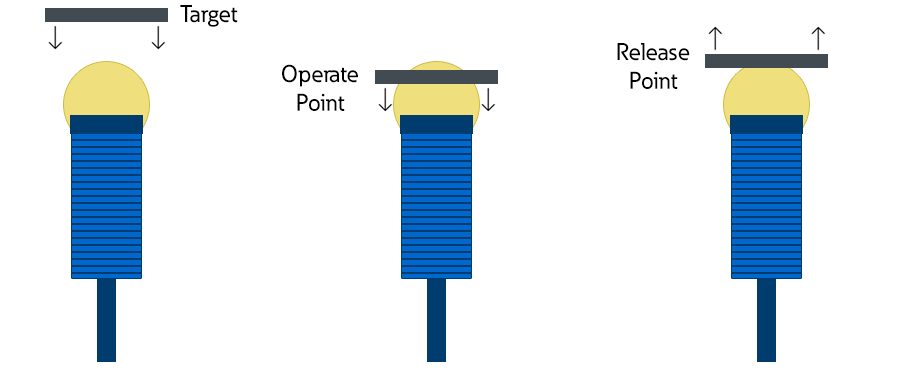
El electrodo móvil se monta sobre un elemento elástico (diafragma/resorte). En primera aproximación: \[ F = k_m x \quad \Rightarrow \quad x(b)=\frac{F(b)}{k_m} \] \(k_m\) es la rigidez. \(k_m\) grande → menos desplazamiento; \(k_m\) pequeño → más sensibilidad.
4) Voltaje (sensor)
Para desplazamientos pequeños alrededor del punto de operación \(b\), usamos la relación local (preparatoria/ingeniería): \[ \Delta V \approx E(b)\,\Delta x \] Sustituyendo el campo: \[ \Delta V \approx \frac{2\pi k\,\lambda\,a\,b}{(a^2+b^2)^{3/2}}\;\Delta x \] Y la forma de calibración (despejando \(\Delta x\)): \[ \Delta x \approx \Delta V\;\frac{(a^2+b^2)^{3/2}}{2\pi k\,\lambda\,a\,b} \]
5) Acondicionamiento
La señal \(\Delta V\) suele ser pequeña (mV). Se amplifica y filtra: \[ V_{cond}=G\,\Delta V \] donde \(G\) es la ganancia. También se limita al rango del ADC (ej. 0–3.3 V).
6) ADC
El ADC convierte voltaje a número entero: \[ N=\mathrm{round}\left(\frac{V_{cond}}{V_{ref}}(2^n-1)\right) \] donde \(n\) es el número de bits y \(V_{ref}\) la referencia.
7) Microcontrolador
El microcontrolador reconstruye el voltaje medido y aplica la calibración para obtener \(\Delta x\): \[ V_{cond,rec}=\frac{N}{2^n-1}V_{ref},\quad \Delta V_{rec}=\frac{V_{cond,rec}}{G} \] \[ \Delta x \approx \Delta V_{rec}\;\frac{(a^2+b^2)^{3/2}}{2\pi k\,\lambda\,a\,b} \]
8) Dato digital
El resultado se expresa en unidades físicas útiles: \(\Delta x\) (mm), o si se requiere, fuerza \(F=k_m \Delta x\).
9) Control / monitoreo
Se compara contra umbrales (alarma) y se registra para análisis: si \(\Delta x > \Delta x_{max}\) → alarma/acción. También se puede enviar a una base de datos o dashboard.
Diagrama del sensor (bloques)
Este diagrama es el “mapa” que deben seguir: cada bloque es una conversión (transducción) hasta llegar a dato y monitoreo.
Imágenes

🧭 Diseño mecánico (común a ambas versiones)
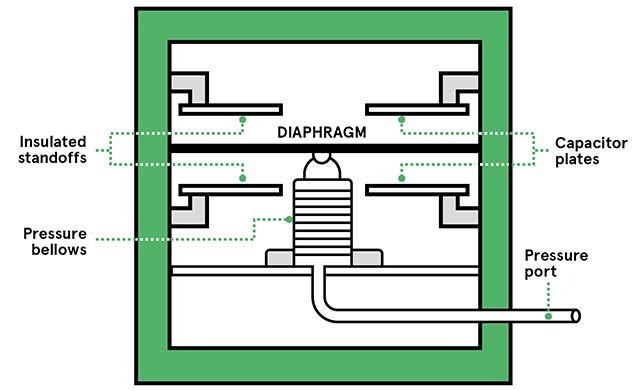
Construiremos un sensor capacitivo equivalente: un electrodo fijo (anillo o placa) y un electrodo móvil (disco/placa) montado sobre un elemento elástico (diafragma o resorte). El desplazamiento \(\Delta x\) cambia la capacitancia \(C\), y ese cambio lo convertimos a tiempo/frecuencia/voltaje.
Dimensiones recomendadas (robustas para aula)
- Anillo (electrodo fijo): radio externo 25–30 mm, ancho 5–8 mm (cobre/aluminio).
- Disco (electrodo móvil): diámetro 30–40 mm (cobre/aluminio).
- Separación ajustable: 0.5 mm a 10 mm (objetivo del laboratorio).
- Guía: tornillo + tuerca fina o soporte tipo micrómetro (para repetibilidad).
- Blindaje: cable corto apantallado (ideal coaxial) y referencia a tierra para reducir ruido.
Material
Mecánico
- Lámina de cobre o aluminio 0.3–0.8 mm (para anillo y disco).
- Base de acrílico/PVC 5–8 mm (rigidez).
- Separadores plásticos M3/M4 (5–15 mm) + tornillería.
- 1 tornillo de ajuste (paso fino) + tuerca, o un micrómetro básico.
- Diafragma: lámina PET/acetato delgado o resortes pequeños (constante \(k_m\)).
- Cable apantallado o coaxial (RG-174) + caimanes.
Electrónica
- Protoboard + jumpers
- Resistencias: 1 MΩ, 4.7 MΩ, 10 MΩ (mínimo 2 pzas de 10 MΩ)
- Capacitores: 100 pF, 1 nF (para pruebas y comparación)
- Fuente 5 V USB
Ruta A (Arduino)
- Arduino Uno o Nano
- Resistencia 10 MΩ (medición RC timing)
- (Opcional) 74HC14 (Schmitt trigger) o LM393 para robustecer umbral
Ruta B (Analógica)
- NE555
- Potenciómetro 100 kΩ (ajuste fino)
- Multímetro con frecuencia o (ideal) osciloscopio
Versión A: Arduino (digital, rápida, robusta)
Principio físico-electrónico
El sensor produce un cambio de capacitancia \(C(b)\). Si usamos un resistor \(R\) grande, el tiempo de carga cumple: \[ t \approx R\,C(b) \] Por lo tanto, midiendo \(t\) (microsegundos) obtenemos \(C\) y, por calibración, obtenemos \(b\) o \(\Delta x\).
Conexión sugerida (simple)
- Electrodo fijo → pin digital D8
- Electrodo móvil → nodo de medición → pin digital D9
- Resistor 10 MΩ entre D8 y D9
- Blindaje/carcasa metálica (si existe) → GND
Código Arduino (pegar tal cual en Arduino IDE)
// practicaelectrostatica_arduino.ino
const int PIN_OUT = 8; // excita (carga)
const int PIN_IN = 9; // detecta (umbral digital)
const unsigned long TIMEOUT = 200000; // us
void setup(){
Serial.begin(115200);
pinMode(PIN_OUT, OUTPUT);
pinMode(PIN_IN, INPUT);
}
// Mide tiempo de carga RC aproximado
unsigned long measureRC(){
// descargar
digitalWrite(PIN_OUT, LOW);
pinMode(PIN_IN, OUTPUT);
digitalWrite(PIN_IN, LOW);
delayMicroseconds(50);
// medir carga
pinMode(PIN_IN, INPUT);
digitalWrite(PIN_OUT, HIGH);
unsigned long t0 = micros();
while (digitalRead(PIN_IN) == LOW){
if (micros() - t0 > TIMEOUT) return TIMEOUT;
}
return micros() - t0;
}
void loop(){
unsigned long t = measureRC();
Serial.println(t); // t ~ R*C(b)
delay(50);
}Qué debe entregar el alumno (Arduino)
- Tabla: \(b\) (mm) vs \(t\) (µs)
- Gráfica: \(t\) vs \(b\)
- Ajuste de calibración: \(b=f(t)\) o \(\Delta x=f(t)\)
- Umbral de alarma: si \(b\) cruza límite, imprimir “ALARMA” en Serial
Versión B: 100% analógica (NE555)
Principio
El NE555 en modo astable genera una frecuencia que depende de \(C(b)\): \[ f \approx \frac{1.44}{(R_1+2R_2)\,C(b)} \] Si \(b\) cambia, \(C(b)\) cambia y la frecuencia cambia. Medimos \(f\) con multímetro (modo Hz) u osciloscopio.
Componentes recomendados
- \(R_1 = 100\,k\Omega\)
- \(R_2 = 1\,M\Omega\) (o 2.2 MΩ si la señal es muy alta)
- \(C =\) el sensor (electrodos)
Qué debe entregar el alumno (analógico)
- Tabla: \(b\) (mm) vs \(f\) (Hz)
- Gráfica: \(f\) vs \(b\)
- Ajuste: \(b=g(f)\) (calibración)
📏 Procedimiento de medición y calibración
Paso 1 — Preparación
- Arma el electrodo fijo (anillo/placa) y el electrodo móvil (disco/placa).
- Asegura guía mecánica para repetir posiciones: 0.5, 1, 2, 5, 10 mm.
- Conecta cable corto apantallado y referencia a GND (reduce ruido).
Paso 2 — Medición
- Arduino: registra \(t\) (µs) en cada \(b\) (mm). Promedia 20–50 lecturas.
- NE555: registra \(f\) (Hz) en cada \(b\) (mm). Promedia 10 lecturas.
Paso 3 — Curva de calibración
Ajusta una curva empírica (por ejemplo, polinómica suave) para obtener \(b=f(t)\) o \(b=g(f)\). Lo importante: que el alumno vea el concepto de sensor calibrado: señal → variable física.
Paso 4 — Monitoreo
Define un umbral, por ejemplo: \(\Delta x_{max}=2\,mm\). Si la estimación excede el umbral → alarma. Esto cierra el bloque 9) control/monitoreo.
Rango y resolución esperados
- 0.5 mm: cambio fuerte en capacitancia (señal notable). Excelente para demostrar sensibilidad.
- 1–5 mm: rango “usable” y repetible para calibración.
- 10 mm (1 cm): la señal baja; mejora con cable corto, apantallado, \(R\) grande (10 MΩ) y promediado.
- Tip clave: el mayor enemigo es el ruido por entorno (humedad, manos cerca, cables largos). Blindaje y disciplina de medición.
Cómo lo conectas con tu teoría (para clase)
La teoría se traduce a un dispositivo real. El anillo (campo) inspira el principio; el sensor real (capacitancia) lo implementa de forma estable y medible.
Contenido
1→9 desde la fórmula Diagrama de bloques Imágenes y discusión Diseño mecánico Lista de compras Versión Arduino Versión analógica Procedimiento & calibración Rango / resolución Conexión con teoríaRuta de archivos
Sube las imágenes como:
img/D1.webp
img/D2.png
img/D3.jpg
img/D4.jpg