Contenido
1) Idea central — ¿qué es cinemática y cómo se usa aquí?
La cinemática estudia cómo se mueven los cuerpos (posición, velocidad, aceleración) sin analizar aún las fuerzas. En redes de poleas, la herramienta clave es la longitud constante de la cuerda: cada cuerda impone una restricción entre desplazamientos, velocidades y aceleraciones.
Analogía 1 (control): piensa en $y(t)$, $v(t)=\dot y(t)$, $a(t)=\ddot y(t)$ como señales que pasan por “bloques integradores”. La cuerda es un enlace rígido que fija la relación entre señales.
Analogía 2 (transmisiones): una polea móvil actúa como una reducción 2:1: el punto de anclaje “ve” el doble del movimiento que la polea porta. De ahí las relaciones **1:1** (cuerda simple) y **2:1** (polea móvil).
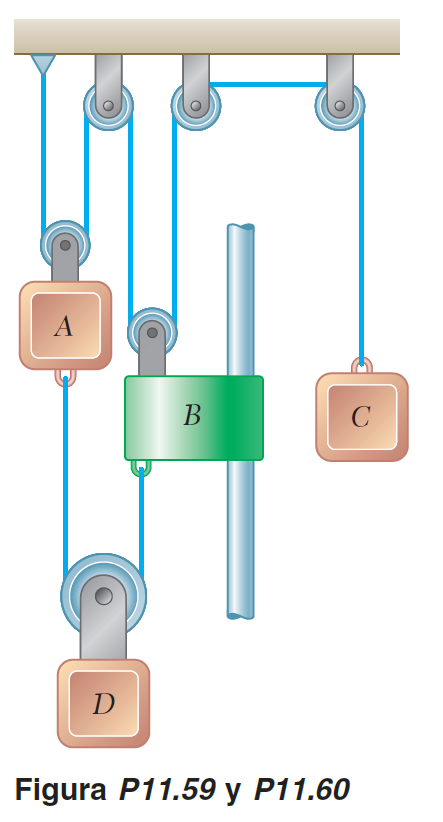
2) Figura 11.59 — Discusión completa del problema
Convenciones
- Eje y signos: positivo hacia abajo para todos. Si “sube”, es negativo.
- Desde reposo: $v(0)=0$ en todos los bloques.
- Unidades: trabajamos en mm y s (como pide el enunciado).
Datos relativos → ecuaciones
Restricciones de cuerda (longitud constante)
Superior (ver 11.59-1): cuenta segmentos activos: polea móvil en A (2), polea en B (2), extremo C (1):
Inferior (ver 11.59-2): la cuerda cuelga a D (2) y se alimenta desde A y B (−1,−1):
Resolución paso a paso
- De (R1) en (C1): \(2a_A+2a_B+(a_B-60)=0 \Rightarrow \boxed{2a_A+3a_B=60}\) (E1).
- De (R2) en (C2): \(-a_A-a_B+2(a_A+110)=0 \Rightarrow \boxed{a_A-a_B=-220}\) (E2).
- De (E1) y (E2): \(\boxed{a_B=100},\ \boxed{a_A=-120}\) (mm/s²).
- Con (R1)-(R2): \(\boxed{a_C=40},\ \boxed{a_D=-10}\) (mm/s²).
Lo que pide el problema (MRUA)
- (a) Velocidad de C a 3 s: \(v_C(3)=a_C\,t=40\times 3=\boxed{120\ \text{mm/s}}\) (hacia abajo).
- (b) Cambio de posición de D a 5 s: \(\Delta y_D=\tfrac12(-10)(5)^2=\boxed{-125\ \text{mm}}\) ⇒ 125 mm hacia arriba.
Chequeos de comprobación
- (R1) \(a_C-a_B=40-100=-60\) ✓
- (R2) \(a_D-a_A=-10-(-120)=110\) ✓
- (C1) \(2(-120)+2(100)+40=0\) ✓
- (C2) \(-(-120)-100+2(-10)=0\) ✓
3) Figura 11.59-1 — Parte superior: ¿de dónde salen 2,2,1?
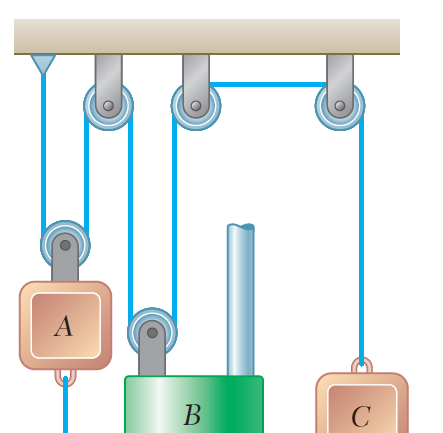
Cada milímetro que desciende una polea móvil “consume” dos milímetros de cuerda: por eso su desplazamiento entra con coeficiente 2. El extremo en C solo aporta uno. Esa contabilidad geométrica da:
Analogía: es como una transmisión con relación efectiva 2:1 en A y 2:1 en B, actuando sobre la misma cuerda.
4) Figura 11.59-2 — Parte inferior: ¿de dónde salen −1,−1,2?
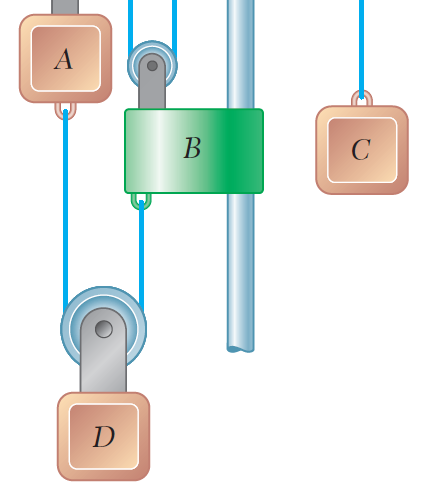
Si A o B bajan, “entregan” cuerda hacia la polea de D, por eso entran con signo opuesto. D, al ser polea móvil, entra con 2:
5) La clave para resolver cualquier red de poleas
- Dibuja cada cuerda y cuenta segmentos activos: polea móvil = 2, extremo = 1.
- Fija un signo (recomiendo abajo +) y no lo cambies.
- Escribe longitudes (en desplazamientos), deriva a velocidades y a aceleraciones.
- Transcribe textualmente los datos relativos: \(a_{X/Y}=a_X-a_Y=\pm(\text{valor})\).
- Resuelve en cadena (menos incógnitas primero), y luego aplica MRUA si parten del reposo.
- Verifica restricciones y relativos en posiciones, velocidades y aceleraciones.
6) Ejercicio variante
Nuevo enunciado: en la misma figura, \(a_{C/B}=-80\ \text{mm/s}^2\) (hacia arriba), \(a_{D/A}=+60\ \text{mm/s}^2\) (hacia abajo). Parte del reposo.
- (C1)+(R1): \(2a_A+3a_B=80\).
- (C2)+(R2): \(a_A-a_B=-120\).
- Solución: \(a_B=56,\ a_A=-176,\ a_C=-24,\ a_D=-116\) (mm/s²).
- Si piden \(v_C(3)\), \(\Delta y_D(5)\): \(v_C=-72\) mm/s (arriba); \(\Delta y_D=\tfrac12(-116)(25)=-1450\) mm (1450 mm arriba).
- Comprueba C1, C2, R1 y R2 con tus números.
7) Conclusión
La diferencia entre soluciones nace de cómo modelas la cuerda. Si la superior “toca” las dos poleas móviles (A y la solidaria a B) y el extremo en C, la ecuación correcta es \(2a_A+2a_B+a_C=0\); combinada con la inferior \(-a_A-a_B+2a_D=0\) y los datos relativos, el problema se cierra sin fuerzas. Copia estas ecuaciones tipo a tu libreta y practícalas: son el núcleo para redes de poleas más grandes.